Оценка эффективности и качества работы информационно-управляющих комплексов
В статье с привлечением математического аппарата теории вероятности и массового обслуживания анализируются основные параметры систем телемеханики – надежность, достоверность, быстродействие. Отыскиваются методы достижения оптимальных параметров.
Внедрение информационных технологий в энергетике, промышленных предприятиях и инженерных объектах коммунального хозяйства требует создания многофункциональных информационно-управляющих систем (ИУС). Современная элементная база и средства передачи информации позволяют интегрировать в одну систему территориально рассредоточенные объекты, удаленные от центров управления на расстояние 100 и более километров.
Традиционно ИУС разделялись на три основных класса: автоматизированные системы диспетчерского управления (АСДУ); автоматизированные системы коммерческого учёта электроэнергии (АСКУЭ); регистраторы аварийной информации (РАИ). Функциональная нагрузка на системы управления, дороговизна создания отдельных каналов связи для каждого класса систем, сложность их обслуживания способствуют объединению различных классов устройств и созданию многофункциональных (интегрированных) комплексов, в которые указанные классы вводятся как подсистемы. Наряду с очевидными преимуществами создания интегрированных информационно-управляющих комплексов возникают аппаратные и программные трудности. Сложность синтеза интегрированных ИУС можно свести к двум основным проблемам: необходимости обеспечения высоких показателей достоверности информации и оптимизации сопряжения между компонентами единой системы, особенно при интеграции компонентов разных производителей.
Анализ экспонатов Международных выставок показывает, что многие интегрированные ИУС создаются механическим объединением разнородных компонентов, причем для оценки качества образованного конгломерата составных частей используются показатели, не отражающие реальные параметры системы в целом. Приведем несколько характерных примеров:
- в качестве показателя оперативности (быстродействия) системы предлагается использовать время передачи одного информационного сообщения по каналу связи между периферийным и центральным пунктами,
- показатель надежности системы предлагается оценивать наработкой на отказ для каждого отдельного модуля,
- достоверность информации зачастую определяется лишь по воздействию помех на сообщение, передаваемое по каналу связи.
Введенные показатели не отражает реальное состояние дел, особенно при работе ИУС в нештатных ситуациях. Поясним опасность внедрения «механически» созданных интегрированных ИУС.
При искаженной интерпретации показателя оперативности системы не учитываются:
- вероятность искажения данных и, как следствие, отказ приемника от обработки и регистрации полученных данных;
- задержка между первичной и повторной передачами одного и того же сообщения при искажении ранее переданного;
- вероятность искажения при вводе информации от датчиков;
- вероятность искажения данных в линейных адаптерах и других устройствах, включенных в трассу доставки информации приемнику;
- задержка начала передачи уже подготовленной информации.
Для иллюстрации на рис.1 приведена трасса для сигналов состояния оборудования подстанции или инженерных объектов коммунального хозяйства.

t1= n · tд, где n – число датчиков, tд – временная дискретность опроса датчиков,
t2 – время сдвига между моментами ввода и передачи данных. Задержка вызывается, например, ранее начатой передачей данных от данного или другого модуля. Сдвиг является вероятностной величиной, причем максимальное значение t2 равно длительности рабочего цикла (Трц) передачи информации при условии, что в очереди на передачу нет модулей с более приоритетными данными. Будем считать, что t2 = Трц · Коч, где Коч – коэффициент, учитывающий вероятность наличия очереди на передачу данных, 0≥ Коч ≤ 1,
t3 – время задержки готовности канала связи к передаче новой информации. Указанная задержка также является вероятностным параметром. Например, при использовании полудуплексного режима передачи информации разрешение на передачу формирует ведущий пункт (master), который синхронизирует очередность предоставления канала связи ведомым пунктам (slave). Если, например, для синхронизации полудуплексного канала связи используются специальные посылки – «меандры» (М), максимальное время t3 = Тм, а вероятное время t3 = Тм· Км, где Км – коэффициент, учитывающий текущее состояние по передаче синхронизирующих посылок, 0≥ Км ≤ 1,
t4 = N / Fnep, где N – число бит информационного сообщения, Fnер – тактовая частота передатчика, определяющая скорость передачи данных, t4 – длительность рабочего цикла, т.е. время передачи одного сообщения по каналу связи,
t5 = nмод· Tдискр · Кn, где nмод число модулей, включенных в состав периферийного устройства интегрированного ИУС, Tдискр – интервал времени между опросами смежных модулей (дискретность опроса состояния модулей), Кn – коэффициент, учитывающий смещение опрашиваемого модуля относительно модуля, уже передающего информацию. Таким образом, t5 – вероятное время ожидания опроса данных любого модуля,
t6 = N / FПЭВМ , где N – число бит в принятом сообщении, FПЭВМ – скорость ввода информации в ПЭВМ обрабатывающего центра устройства ПУ (ЦППС). Таким образом, t6 - это время ввода полученной информации в ПЭВМ,
t7 = Lпрогр · Fпрогр , где Lпрогр – длина программы обработки полученной информации, Fпрогр – скорость реализации программы (тактовая частота процессора ПЭВМ). Таким образом, t7 – время обработки полученной информации,
t8 следует учитывать, если для визуализации информации используется не экран монитора ПЭВМ, а внешний модуль, размещенный, например, в щите диспетчерском. В последнем случае t8 = nотобр · Fотобр, где первый множитель соответствует числу бит кода выводимой информации, а второй – скорости вывода данных.
Суммарное время задержки Тзад равно:

Для определения показателя реального быстродействия ИУС необходимо также учитывать вероятность обнаружения приемником искажения информации, в результате чего потребуется повторная передача. В таком случае реальное быстродействие (оперативность) следует определять по формуле:
Треал. зад = Тзад + Pиск (Tож.квит. + Тзад + Тгот.перед), (2)
где: Pиск – вероятность искажения однократно принятого сообщения, Pиск=N · P1 ,
P1 = 10-3 - 10-4 - вероятность однократного искажения информации помехами в канале связи,
Tож.квит – время ожидания квитанции, которая подтверждает нормальный прием информации. Чаще всего диапазон времени ожидания - 1…10 сек.,
Тгот.перед – время задержки между фиксацией факта необходимости повторной передачи информации и готовностью передатчика реализовать повторный вывод данных.
Расчет по формуле (2) показывает, что реальное быстродействие системы в три-пять раз ниже обычно указываемого в рекламных материалах ИУС.
Показатель надежности ИУС необходимо выражать временем наработки на отказ для одного канала каждой выполняемой функции. Однако многие производители ИУС в рекламных материалах приводят другой показатель – наработку на отказ не одного канала, а одного модуля. В результате «надежность» выражается цифрами наработки на отказ в 100000, а иногда 1000000 часов. Подчеркнем, что эти цифры не отражают реальную надежность ИУС. Поясним сказанное анализом структуры части ИУС, которая должна учитываться при расчете реальной надежности для одного канала данной функции (рис.2).
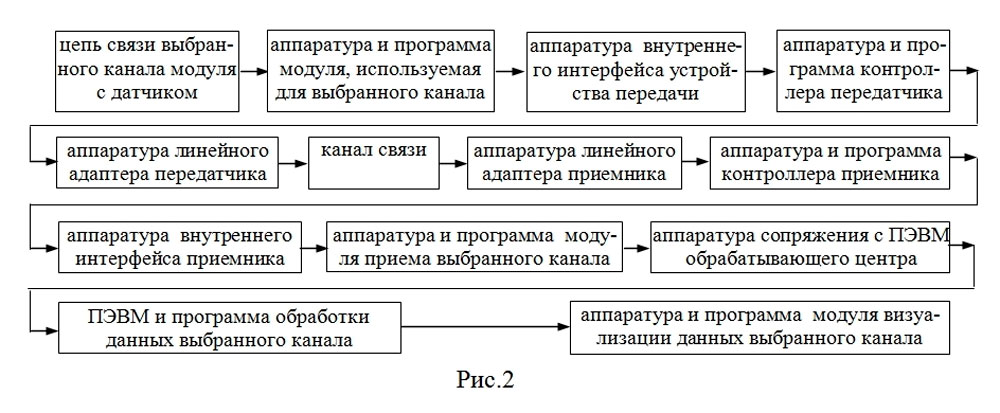
Видно, что для определения надежности одного канала требуется учитывать большую часть аппаратуры всего ИУС. Показатель надежности зависит не только от построения модуля для выбранного вида информации, но, в еще большей степени, от общей структуры комплекса. Проведя расчет показателя надежности по приведенной структуре, можно показать, что без принятия дополнительных мер - углубления диагностики, введения резервирования, достичь даже «более скромных» данных, оговоренных в стандарте (16000 часов), невозможно.
Показатели оперативности, надежности, помехоустойчивости являются составляющими обобщающего показателя – интегральной достоверности, которая определяется по вероятности не обнаруживаемого искажения информации. Естественно, что при расчете интегральной достоверности необходимо учитывать данные всех модулей, приведенных на рис.2. Вероятность не обнаруживаемого искажения информации (Рнеоб иск) определяется формулой:
Рнеоб иск = Рввод + Ркс + Ркодер + Рдекодер , где (3)
РТСввод - вероятность искажения при вводе сигнала от датчика,
РТСКС - вероятность искажения при передаче информации по каналу связи,
РТСкодер - вероятность искажения при кодировании,
РТСдекодер - вероятность искажения при декодировании информации на стороне приемника.
Например, в ИУТК «Гранит-микро» (Л.1) для уменьшения Рнеоб иск применяются:
- совмещение цепей ввода информации с ее кодированием,
- использование специальных методов кодирования с образованием биимпульсного условно корреляционного кода,
- дополнение циклического кода сообщения шестнадцатиразрядной контрольной последовательностью,
- передача сообщения прямым и инверсным кодами,
- максимальное использование при формировании компонентов информационного сообщения распределительных кодов (кодов «1» из «N»),
- резервирование трассы доставки информации в приемник.
Комплексное применение указанных мер позволило получить значения Рнеоб иск для канала сигнализации состояния оборудования на уровне 10-13, аналогичные мероприятия для канала управления позволили добиться значения вероятности не обнаруживаемого искажения на уровне 10-16.
Показано, что высокие показатели качества и эффективности ИСУ не могут быть достигнуты без теоретической, структурной и системной разработки методов интеграции отдельных подсистем в единую интегрированную систему.
Другим важным фактором, влияющим на показатели ИСУ, является протокол информационного обмена между периферийными и центральным пунктами (Л.2). Особое внимание выбору и реализации протокола следует уделять при синтезе ИСУ из компонентов разных производителей. Стандартами на ИСУ рекомендуется использовать международные протоколы информационных обменов, в частности, интеллектуальные протоколы IEC 870-5-101 (104).
Однако по сложившейся практике предлагаемые для использования протоколы не связываются с разработкой или доработкой ИСУ для согласования структур и алгоритмов работы с идеологией используемых протоколов. Как правило, предлагаемые протоколы «поддерживаются» уже существующими системами вне зависимости от того, насколько оптимально протокол может быть в них реализован. В результате ожидаемый эффект от унификации информационных обменов может быть сведен к нулю. Жесткую корреляцию протокола и структуры ИСУ в целом покажем на примере использования унифицированного протокола для наиболее ответственного канала – формирования и выполнения команд управления исполнительными механизмами.
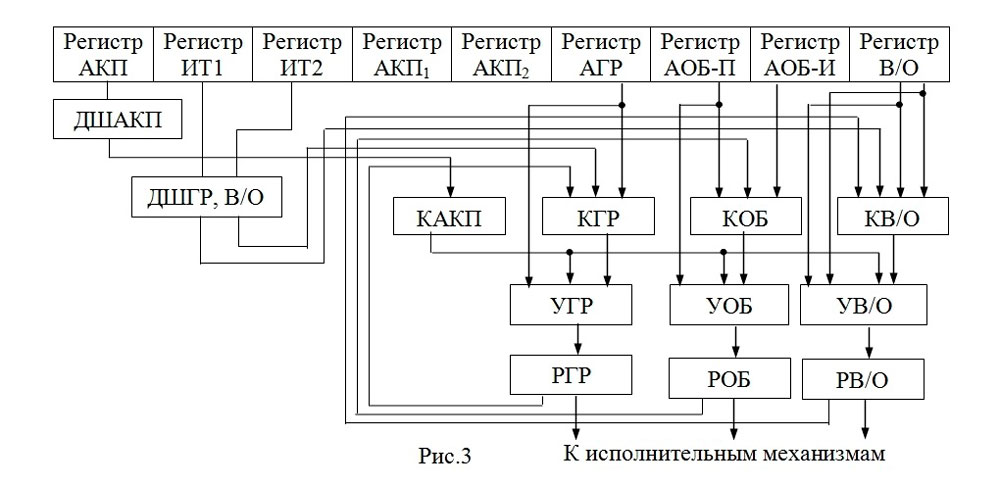
На рис.3 показана структура модуля приема, обработки и вывода команд управления ИСУ для реализации протокола IEC 870-5-101 (104).
Определим условия, при которых модуль обеспечит требуемую стандартом интегральную достоверность информации – вероятность не обнаруживаемого искажения РНЕОБ. ИСК ≤ 10-16.
Обязательными для протокола является формирование адреса периферийного (контролируемого) пункта – АКП и двух идентификаторов типа информации (ИТ1 и ИТ2), которыми задается вид поступивших данных – команда управления, тип команды – «включить» или «отключить», принадлежность управляемого объекта к одной из групп.
Модуль выполняется по дублированной схеме.
Данные регистра памяти принятого кода АКП с помощью дешифратора (ДШАКП) преобразуются в позиционный код, идентичный позиционному коду, занесенному в регистры координат АКП1 и АКП2. Принятый и образованный дешифратором позиционные коды сравниваются компаратором КАКП. Сигнал «1» на выходе компаратора, который образуется при полном совпадении сравниваемых кодов, является сигналом разрешения перевода усилителей групп (УГР), объектов (УОБ) и вида команды (УВ/О) в состояние, задаваемое сигналами от соответствующих регистров.
Сигналы адреса группы объектов управления, которые включены в коды идентификации типа сообщения, преобразуются дешифратором (ДШГР, В/О) в позиционный код. Образованный код сравнивается с кодом на выходе регистра (РГР) компаратором КГР. Если сравниваемые коды совпадают во всех разрядах, на выходе КГР образуется сигнал разрешения перевода УГР в рабочее состояние.
Так как сигналы выбора номера объекта управления в группе не дублируются в АКП, ИТ1, ИТ2, для уменьшения вероятности появления не обнаруживаемого искажения позиционный код передается дважды – прямым и инверсным кодами. Совпадение кодов (естественно, при инверсии АОБ-И) фиксируется компаратором КОБ, сигнал от которого разрешает перевод усилителей УОБ в рабочее состояние.
Отсутствие искажений кода «ВКЛЮЧИТЬ» или «ОТКЛЮЧИТЬ» проверяется аналогично проверке кода группы объектов ТУ.
Сигналы усилителей УГР, УОБ, УВ/О задают состояние соответствующих промежуточных реле (РГР, РОБ, РВ/О). Контакты реле используются для проверки совпадения поданных на реле сигналов управления и полученных от них по цепи информационной обратной связи. Если указанные выше компараторы не обнаруживают несовпадение сигналов, принятая команда с рабочих контактов реле подается на исполнительные механизмы.
Как видно, предложенная схема модуля приема и вывода команды управления обеспечивает дублированный контроль всех компонентов команды. Рассмотрим вероятность появления не обнаруживаемого искажения команды из-за неисправности аппаратуры.
Естественно, что при контроле с помощью компараторов проверяется также образование на выходе каждой компоненты команды только одного сигнала «1».
Не обнаруживаемое искажение команды телеуправления (ТУ) из-за неисправности аппаратуры (АПП) выходного узла РАППТУ равна:
РАПП ТУ = РАППКП + РАППГР + РАППВ/О (4)
В свою очередь,
РАППКП = РАППАКП1+АКП2 · РАППАКП (5)


Искажение произойдет при сочетании следующих вероятностных событий:
- двойной неисправности регистров АКП1 и АКП2,
- двойного перехода сигнала «1» в «0», сигнала «0» - в «1»,
- указанные события приведут к появлению новой разрешенной комбинации из общего числа возможных кодовых комбинаций.
Для появления не обнаруживаемого искажения АКП (РАППАКП ) необходимо, чтобы код, занесенный в регистр, был искажен из-за неисправности аппаратуры, а при дешифрации искаженного двоичного кода АКП возникла единственная кодовая комбинация, соответствующая выходному коду регистров АКП1 и АКП2.

Принцип двойного контроля аппаратуры, фиксирующей номера группы объектов управления идентичен используемому для контроля АКП, поэтому:

Двойной контроль аппаратуры, фиксирующей вид команды управления, основан на передаче позиционного кода прямым и инверсным кодами. Не обнаруживаемое искажение кода произойдет при однотипных двойных искажениях аппаратуры обоих регистров. Поэтому:
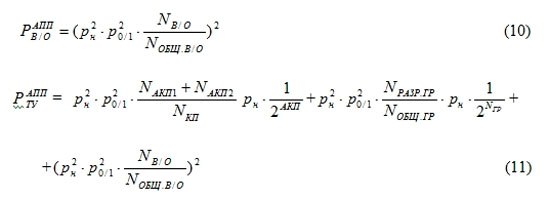
Подставив в (11) цифровые значения: Рн = 10-6, Ро/1 = 0,5, NАКП1 + NАКП2 = 16, NОБЩ.КП = 216, NРАЗР.ГР = 16, NОБЩ.ГР = 216, NВ/О = 8, NОБЩ.В/О = 28, получим РАППТУ ≈ 10-19.
Легко проверить, что при исключении хотя бы одной из двойных проверок вероятность появления не обнаруживаемого искажения команды превысит требования стандарта. Только сочетание всех описанных методов выполнения модуля приема и вывода команды управления исполнительными механизмами обеспечит достижение интегральной достоверности на уровне, соответствующем жестким требованиям стандарта.
Создание современных интегральных информационно-управляющих комплексов требует всестороннего системного теоретического анализа реальных (а не рекламных) показателей качества ИСУ. Во многом возникающие при использовании ИСУ проблемы связаны с тем, что действующие стандарты не «поспевают» за развитием информационных технологий. Убеждены, что ученые инженерной Академии могут внести большой вклад в создание стандартов, стимулирующих ускоренное использование современных информационно-управляющих систем (комплексов).
Литература:
Портнов Е.М., Ищенко А.С. и др. Системотехника интегрированных информационно-управляющих комплексов «Гранит-микро», сборник докладов научно-технического семинара – выставки «Современные системы сбора, обработки и отображения информации на объектах электроэнергетики», М. 2006 г.
Портнов Е.М., Ищенко А.С. Особенности реализации оперативного и неоперативного контура интегрированного информационно-управляющего телемеханического комплекса, сборник докладов научно-технического семинара – выставки «Современные системы сбора, обработки и отображения информации на объектах электроэнергетики», М.2007 г.
Авторы: Портнов Евгений Михайлович, доктор технических наук, профессор Московского института электронной техники (технического университета), академический советник инженерной Академии Украины, научный консультант НПП «Промэкс» (г. Житомир).
Адрес: г. Москва, Зеленоград, корпус 1202, кв.100, телефон (8-107-499)-717 57 09
Ищенко Александр Сергеевич, аспирант Днепропетровского национального университета железнодорожного транспорта, главный инженер проекта НПП «Промэкс»
Адрес: г. Житомир, проспект Мира, 19, кв.290, телефон (8-0412) – 25 74 95.
Адрес для переписки: 10001, г. Житомир, пер. Вокзальный, 14, кв.8, Портнов Е.М.,
Контактный телефон: 80412 36-37-79, +38 066 783 22 67
Аннотация. В статье с привлечением математического аппарата теории вероятности и массового обслуживания анализируются основные параметры систем телемеханики – надежность, достоверность, быстродействие. Отыскиваются методы достижения оптимальных параметров.
Анотація. У статті на основі математичного апарату теорії імовірності та масового обслуговування аналізуються основні параметри систем телемеханіки – надійність, достовірність, швидкодія. Знаходяться методи одержання оптимальних параметрів.
Annotation. In this article main parameters of telemechanics systems - reliability, trustwor-thiness, processing speed are analyzed by probability theory and queuing theory.
There are search methods of achievement optimal parameters.